蜘蛛型舞踏体開発概略
1.開発の背景
FEGは、極度に高層化を遂げた国である。
重力に逆らい、上へ上へと発展した国である。
しかしながら、この面積が小さい土地を最大限に利用する事を主眼とした形式は、元来「人型の生物」にとって不便なものであると言える。人型は上下移動に向いていないのである。
そこで人間は、建築物内部に階段を作り、エスカレーターを作り、エレベーターを作って「縦方向の動線」を確保した。
これによって、限定的ながらも土地を立体的に使用することが出来るようになったのである。
だが、ここにもまた問題がある。
その建築物を作るのは誰か?
その建築物を保全するのは誰か?
人型は限られた動線によってのみ縦方向に移動できることを考えると、これらは非常に難しい問題であると言える。
ではどうするか。
「人が出来ないことを補ってくれる誰かが必要だ!」
というわけで、後に蜘蛛型舞踏体と呼ばれるアイドレスの開発がスタートしたのである。
重力に逆らい、上へ上へと発展した国である。
しかしながら、この面積が小さい土地を最大限に利用する事を主眼とした形式は、元来「人型の生物」にとって不便なものであると言える。人型は上下移動に向いていないのである。
そこで人間は、建築物内部に階段を作り、エスカレーターを作り、エレベーターを作って「縦方向の動線」を確保した。
これによって、限定的ながらも土地を立体的に使用することが出来るようになったのである。
だが、ここにもまた問題がある。
その建築物を作るのは誰か?
その建築物を保全するのは誰か?
人型は限られた動線によってのみ縦方向に移動できることを考えると、これらは非常に難しい問題であると言える。
ではどうするか。
「人が出来ないことを補ってくれる誰かが必要だ!」
というわけで、後に蜘蛛型舞踏体と呼ばれるアイドレスの開発がスタートしたのである。
2.蜘蛛型舞踏体の特性
 <開発理念>
<開発理念>自分専用の足場を自由自在に組み、移動特性を持って立体機動が可能であること
<移動>
虫というカテゴリに分類される生物の中には、非常に特異かつ先鋭的な能力を持つものが多い。
例えば、トンボ。
その空中捕獲能力を比較すれば、生物であろうと機体であろうとぶっちぎりで敵はいない。
例えば、スズメバチ。
その羽は、超高度な姿勢制御と滞空力を両立する。
そして例えば、蜘蛛。
その長い足はありとあらゆる地形を走破する。
基本的に移動とは安定状態→不安定状態→安定状態という状態変化の繰り返しである。
二足歩行であれば両足という2点で体を支えている状態から片足を上げ、1点で支えている状態を経て、また2点で支える状態に戻る。
その点、8本の肢を駆使する蜘蛛は様々な面で突出して優れている。
A.安定性
移動中でも、常に4点以上で体を支える蜘蛛は、非常に安定性に優れる。
バランスを崩したり、倒れたりするということがない。
B.悪路走破性
肢を乗せる場所さえ確保できるのであれば、どのような地形でも走破する。
凹凸が激しかろうと、接地可能面積が小さかろうとお構いなしである。
蜘蛛型舞踏体は、蜘蛛の構造上の特性を参考とし、不安定な足場でも安全性と立体機動・運搬を両立することがが可能な足回りを得ることとなった。
<糸>
蜘蛛は、「糸いぼ」と呼ばれる器官から多種類の糸を放出し、家作り、捕縛、卵を守るなど使い分ける。
この糸は人間の髪の毛の1/10ほどの太さでありながら、強度は同じ太さの鋼鉄の5倍。伸縮性はナイロンの2倍を超え、400度の熱に耐え、紫外線にも強く、吸水性に富むが故に帯電性も低いなど、繊維として圧倒的な機能を誇る。
さすがにここまでの能力はないものの、蜘蛛型舞踏体にも「糸」を放出する器官が搭載されている。この糸は、実際の蜘蛛が吐き出す糸を参考に開発され、本体からの制御により液体化が可能である。
必要があれば、蜘蛛型舞踏体は、この糸を利用して「足場」を製作する事が可能である。
例えば建築現場において、糸を使って「蜘蛛の巣」のような足場を組み、効率的な移動を行うことがある。
邪魔になった部分は液体化して排除することにより、さらに効率的な足場を組む事が可能である。
このように、自分専用の足場を自由自在に組み、前述の移動特性を持って立体機動を行う。
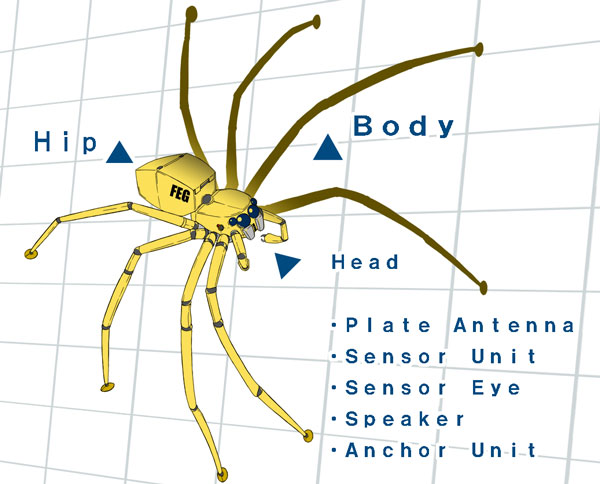
<頭部>
蜘蛛型舞踏体の頭部に、コアの他にも複数のシステムが搭載されている。
人間がそうであるように情報収集のための機能が集中しており、他の部位と比べると多機能となっている。
・プレートアンテナ
人間で言うところの額に当たる部分に搭載された板状アンテナ及び通信機器。
これを使用することで蜘蛛型舞踏体は、ビル壁面のメンテナンス時の応援要請を迅速に行うことができる。
・複合センサーユニット
頭部の左右に搭載されたセンサーユニット。
人間で言うところの耳に当たる装備であり、外部からの音源を収集するマイクが搭載されている。
・複眼型センサーアイ
人間で言うところの目に当たるセンサーであり、蜘蛛型には大小合わせて四つのセンサーアイがある。
有効半径は人間の視力とほぼ同じで、望遠機能や透過機能などの特殊な機能は持ち合わせていない。
・外部スピーカー
ワイヤーアンカーユニットの左右に搭載された牙型のスピーカー。人間で言う口に当たる部分であり、搭載場所も口に近い。
・ワイヤーアンカーユニット
複眼型センサーアイ下部及び尾部に搭載されたワイヤーアンカー射出装置。
<手足>
胴体も含め、立体機動に特化した構造を持つ部位。
名目上は頭部左右にある二つが腕で、残りの八つが足にあたり、壁面を上り下りするためのものなので、先端には登坂用の爪が仕込まれている。
対して、腕の方は作業用なので、精密な動作ができるようになってる。FEG猫が整備などで使用している専用工具を参考に作られた。
反面、両者に共通する問題点として、四肢はそのパワーや精密性に反して可動部が多いため損耗が激しいという欠点が挙げられる。
外装の軽量化を行うことで負担を減らしてはいるものの、小まめな定期検査と関節部の修理・交換は欠かせない。
<ボディ>
見た目から受ける印象と比べ、蜘蛛型舞踏体のボディは頑丈ではない。
これは、軽快な上下移動を実現するには、総重量が軽量であることが重要である。足が8本あるとはいえ、重量化により可動部の負担が増えないよう、外装は極力重量を落とす事を重点に開発が行われ、引っ掻き傷には強いものの、外装として頑丈と言えない外装が開発された。
頑丈と言えないといっても、日常生活やビルのメンテナンスを行うには、問題の無い強度であり、足の可動部に対しての負担も許容範囲内であった。
この外装を採用したことにより、巷で騒がれた蜘蛛型舞踏体の軍事利用を不可能にすることとなったが、蜘蛛型舞踏体の着用者からは喜ばれる結果となった。
3.蜘蛛型舞踏体の誕生の国家的背景
FEG/フィールド・エレメンツ・グローリーが『戦闘特化した国家形態から脱したい』と、願うのは国民の総意であり、本心である。
そもそも、NWがまだ未発達で、高位人も存在しなかった頃から、NWは多くの厄災に見舞われている。
宣戦布告も目的提示もなく、襲いかかってくる外敵に対し、共和国、そして帝國も含むNWは脆弱だった。
ゆえに、国家の結束が強く、人口も多かったFEGがその矢面に立ち、防衛のための戦闘特化を目指さざるを得なかった状況は、NWの多くの人々が記憶している部分でもある。
護りたい。その気持ちに特化し、時には大聯合を組み、時には地上から宇宙まで防衛戦を張り、大統領を輩出し、多くの危機を排除してきた。
しかし、それらが弊害を生んだことも事実である。
経済集中、是空砲の建設、軍事特化した舞踏体、それらから派生する様々な事象が、善政と呼ばれる理想から後退する事実を生んでしまっている。
善政から遠ざかるのは、護りたい。平和のために銃を取る。この行為が生んだ弊害である。
正解だったのか、過ちだったのか、当時を振り返るにこの判断はむずかしい。
しかし、現在。FEG以外の各国は成長し、いまやFEGを追い越している。
この段階にて、FEGは他国との協調により、護られ、依存している側面もみられる。
現段階だからこそ、目指せる国家がある。
それが、脱・戦闘特化であり、善政である。
国民が求め、目指しているのは、次の子供の世代に戦争を残さない未来である。
それは、過去の過ちに気付き、輝ける未来に繋げようという切なる思いである。
幸いにして、この大目標に向けての足がかりができようとしている。
それが、蜘蛛型舞踏体である。
そもそも、NWがまだ未発達で、高位人も存在しなかった頃から、NWは多くの厄災に見舞われている。
宣戦布告も目的提示もなく、襲いかかってくる外敵に対し、共和国、そして帝國も含むNWは脆弱だった。
ゆえに、国家の結束が強く、人口も多かったFEGがその矢面に立ち、防衛のための戦闘特化を目指さざるを得なかった状況は、NWの多くの人々が記憶している部分でもある。
護りたい。その気持ちに特化し、時には大聯合を組み、時には地上から宇宙まで防衛戦を張り、大統領を輩出し、多くの危機を排除してきた。
しかし、それらが弊害を生んだことも事実である。
経済集中、是空砲の建設、軍事特化した舞踏体、それらから派生する様々な事象が、善政と呼ばれる理想から後退する事実を生んでしまっている。
善政から遠ざかるのは、護りたい。平和のために銃を取る。この行為が生んだ弊害である。
正解だったのか、過ちだったのか、当時を振り返るにこの判断はむずかしい。
しかし、現在。FEG以外の各国は成長し、いまやFEGを追い越している。
この段階にて、FEGは他国との協調により、護られ、依存している側面もみられる。
現段階だからこそ、目指せる国家がある。
それが、脱・戦闘特化であり、善政である。
国民が求め、目指しているのは、次の子供の世代に戦争を残さない未来である。
それは、過去の過ちに気付き、輝ける未来に繋げようという切なる思いである。
幸いにして、この大目標に向けての足がかりができようとしている。
それが、蜘蛛型舞踏体である。
4.種族アイドレスとしての蜘蛛型舞踏体
蜘蛛型舞踏体は、当初の開発理念からも分かる通り、FEGの新たな種族アイドレスとして開発がスタートしたものではない。
いわゆる夢の剣事件の折、延命のため蜘蛛型舞踏体として開発されていたN8タイプに大量の国民が意識を移す事件があったのである。
脳の完全エミュレートという技術により蜘蛛型舞踏体に意識を移すことが可能となったのではあるが、直後に起こった黒い塊事件により大量の蜘蛛型舞踏体が機能停止を起こすこととなる。
この事件により、FEGの蜘蛛型舞踏体の数は一時激減することとなる。
その後、黒い塊事件の生き残りや、新たに蜘蛛型舞踏体となったものにより、蜘蛛型舞踏体の個体数が増え始めると、蜘蛛型舞踏体を使用していることの弊害が顕在化する。
人の形質から外れた故の弊害である。
8本ある足、上下移動する際に使う糸。ともに蜘蛛型舞踏体の特徴であるが、人としての特徴ではない。このため、西国人として蜘蛛型舞踏体を使用していることに無理が出るようになり、安定した使用が難しくなってきたのである。
この対策として、蜘蛛型舞踏体を一つの種族、西国人アイドレスと同列のアイドレスとして定義することにより、安定した使用ができるようにする事となったのである。
FEG政府のアイドレス開発チームにより、種族アイドレス蜘蛛型舞踏体として定義されると、以前のような不安定さはなりを潜め、安定して使用できるアイドレスとして完成され現在に至る。
なお、この蜘蛛型舞踏体という呼称は、公文書に記載する場合の呼称である。一般的には、「天を照らす」「天の輝き」からアマテルと呼ばれている。是空藩王が蜘蛛型舞踏体が平和の象徴となるよう願いを込めて呼んだのが始まりであるが、今日では、公の場でもアマテルと呼称されることが多くなっている。
いわゆる夢の剣事件の折、延命のため蜘蛛型舞踏体として開発されていたN8タイプに大量の国民が意識を移す事件があったのである。
脳の完全エミュレートという技術により蜘蛛型舞踏体に意識を移すことが可能となったのではあるが、直後に起こった黒い塊事件により大量の蜘蛛型舞踏体が機能停止を起こすこととなる。
この事件により、FEGの蜘蛛型舞踏体の数は一時激減することとなる。
その後、黒い塊事件の生き残りや、新たに蜘蛛型舞踏体となったものにより、蜘蛛型舞踏体の個体数が増え始めると、蜘蛛型舞踏体を使用していることの弊害が顕在化する。
人の形質から外れた故の弊害である。
8本ある足、上下移動する際に使う糸。ともに蜘蛛型舞踏体の特徴であるが、人としての特徴ではない。このため、西国人として蜘蛛型舞踏体を使用していることに無理が出るようになり、安定した使用が難しくなってきたのである。
この対策として、蜘蛛型舞踏体を一つの種族、西国人アイドレスと同列のアイドレスとして定義することにより、安定した使用ができるようにする事となったのである。
FEG政府のアイドレス開発チームにより、種族アイドレス蜘蛛型舞踏体として定義されると、以前のような不安定さはなりを潜め、安定して使用できるアイドレスとして完成され現在に至る。
なお、この蜘蛛型舞踏体という呼称は、公文書に記載する場合の呼称である。一般的には、「天を照らす」「天の輝き」からアマテルと呼ばれている。是空藩王が蜘蛛型舞踏体が平和の象徴となるよう願いを込めて呼んだのが始まりであるが、今日では、公の場でもアマテルと呼称されることが多くなっている。
5.蜘蛛型舞踏体の活用事例
種族としての形質を保つことにより、FEGには大きく分けて人・猫士・蜘蛛型舞踏体の3種族から形成されるようになった。
人については、西国人・高位西国人のページ。猫士については、FEG猫のページで、詳しく解説されているので、そちらを参照していただくとして、ここでは、蜘蛛型舞踏体が、どのような活動をしているか紹介したい。
蜘蛛型舞踏体は、基本的に戦闘を好まない。このため、戦場で彼らを見ることは殆どないが、反面、内政においての彼らは、必要不可欠な存在となっている。
彼らの立体運動は、高層ビルのメンテナンスの役に立ち、実際国内でも彼らがビルの壁面でメンテナンスをする姿を見る事ができる。FEGは高層ビルの中にさらにビルが立っているという特殊な構造である。通常、人が高層ビルのメンテナンスを行う場合は、ゴンドラを使って上り下りをしないといけないが、国内のビルの高さや数を考えると、移動や安全面で大きな負担が掛かってしまうことが問題となっていた。それを、蜘蛛型舞踏体と協力することとにより、メンテナンスの時間を短縮し、より安全で確実にメンテナンスを行う事により、問題を解決することが可能となった。
また彼らは外見に反して面倒見がよく、保育園では彼らが保育士として子供達と遊んでいる姿がよく見られる。子供はよく隠れ家的な場所に入ったり木の上に登ったりして帰って来れなくなる事があるが、高い所に上り下りのできる彼らはすぐに子供を見つけ出してくるので、子供が事故に合う比率は、彼らを保育士として採用した事で減少傾向にあると統計が出ている。
事務作業も彼らの得意分野である。FEGは、共和国の中でも特に人の出入りが多い国であるため、審査や事務処理などには多大な負担がかかっている。しかし彼らが吏族作業に参加する事で、国内の様々な審査や事務処理がより円滑に行う事ができるようになった。
種族が別れてもFEGの国民であることは変わりない。
そして、国民が目指しているのは脱・戦闘特化国である。
人は猫士に、猫士は舞踏体に、舞踏体は人に。
それそれの国民同士が助け合い、種族の差ゆえに補い合う。
互いの問題点は過去から学んだ。
また、未来への課題も学んだ。
種族としての蜘蛛型舞踏体は肉体は強力だが微に入り細(さい)をうがつ繊細な作業部分は人や猫士に劣る。
人や猫士は成長するまで、蜘蛛型舞踏体に保護してもらうことができる。
成長した人や猫士は蜘蛛型舞踏体を保護(整備)することができる。
そして、それらの活動を全員が共有することができる。
データ上や数値化では求めきれない、感情の共有。個性との共有。
平和的活動を目的とした種族アイドレスである蜘蛛型舞踏体は、建設・児童福祉・内政などの活動を中心とし、また、そのための能力に特化する。
そもそも、戦闘用に生まれていないため、特性を活かすとなると、必然的にそれらの活動が中心になるのだ。
共に和を為す。
目指すその立ち位置を具現化することで、NWの更なる平和に尽力していくことができるだろう。
○蜘蛛型舞踏体の活用事例:その1
報告書にあるとおり、蜘蛛型舞踏体は、高層ビルの建設やメンテナンスに特化する。
それらはかつて人(や、そのパートナーである猫士)が行なったことである。
現在では、蜘蛛型舞踏体が人やサイボーグ(大型含む)、と連携してその作業を円滑化している。
すべては役割分担であり、安全性への特化である。
○蜘蛛型舞踏体の活用事例:その2
保育士を代表とする児童福祉に蜘蛛型舞踏体が特化したのはFEGの願いゆえ。でもある。
人や猫士は幼少より蜘蛛型舞踏体含む多くの種族に触れることにより、この世界は自己単体の種族のみで生きているわけではないことを学べる。
それは蜘蛛型舞踏体も同様であり、生身や機械の差異や特長を知ることで、蜘蛛型舞踏体たちにも個性が生まれ、種族の形質保護の一環を担うことができる。
同然ながら、人・猫士・蜘蛛型舞踏体、それぞれの特性を活かしての児童福祉である。
蜘蛛型舞踏体の活躍により、児童が事故に合う比率も減少傾向にある。という統計も算出されている。
様々な種族が協調する結果として、FEG国民はNW全土に広がる多種多様の種族・知類への理解を深めることができる。
相互理解が生み出すのは協調であり平和である。
蜘蛛型舞踏体がFEGの児童福祉に特化することにより、生まれるメリットは計り知れない。
○蜘蛛型舞踏体の活用事例:その3
内政にも蜘蛛型舞踏体は活躍の場を見いだしている。
そもそも、その複雑な体躯を円滑に活動させるために高い演算能力を有しているため、その能力を活かした吏族作業により、国家の内政を安定化させてくれている。
当然ながら、蜘蛛型舞踏体は機械ではないため、人の吏族などとも連携し、問題点を処理していく。
ただ、その演算能力を作業に集中させてる時間は体躯を動かせない場合がある。稼働熱から猫士のひなたぼっこ替わりの台座になることも多く、政庁城では笑いを誘っている。
これらは問題点では無く、愛きょう。種族が持つ弱点などとして定義されている。
過去に学んだFEGや、NW全体の問題点の改善であり、完璧を目指したゆえに絶滅寸前まで追い込まれた蜘蛛型舞踏体という種族として、残される特長である。
どのような種族も、長所があれば短所もあるのだ。
人については、西国人・高位西国人のページ。猫士については、FEG猫のページで、詳しく解説されているので、そちらを参照していただくとして、ここでは、蜘蛛型舞踏体が、どのような活動をしているか紹介したい。
蜘蛛型舞踏体は、基本的に戦闘を好まない。このため、戦場で彼らを見ることは殆どないが、反面、内政においての彼らは、必要不可欠な存在となっている。
彼らの立体運動は、高層ビルのメンテナンスの役に立ち、実際国内でも彼らがビルの壁面でメンテナンスをする姿を見る事ができる。FEGは高層ビルの中にさらにビルが立っているという特殊な構造である。通常、人が高層ビルのメンテナンスを行う場合は、ゴンドラを使って上り下りをしないといけないが、国内のビルの高さや数を考えると、移動や安全面で大きな負担が掛かってしまうことが問題となっていた。それを、蜘蛛型舞踏体と協力することとにより、メンテナンスの時間を短縮し、より安全で確実にメンテナンスを行う事により、問題を解決することが可能となった。
また彼らは外見に反して面倒見がよく、保育園では彼らが保育士として子供達と遊んでいる姿がよく見られる。子供はよく隠れ家的な場所に入ったり木の上に登ったりして帰って来れなくなる事があるが、高い所に上り下りのできる彼らはすぐに子供を見つけ出してくるので、子供が事故に合う比率は、彼らを保育士として採用した事で減少傾向にあると統計が出ている。
事務作業も彼らの得意分野である。FEGは、共和国の中でも特に人の出入りが多い国であるため、審査や事務処理などには多大な負担がかかっている。しかし彼らが吏族作業に参加する事で、国内の様々な審査や事務処理がより円滑に行う事ができるようになった。
種族が別れてもFEGの国民であることは変わりない。
そして、国民が目指しているのは脱・戦闘特化国である。
人は猫士に、猫士は舞踏体に、舞踏体は人に。
それそれの国民同士が助け合い、種族の差ゆえに補い合う。
互いの問題点は過去から学んだ。
また、未来への課題も学んだ。
種族としての蜘蛛型舞踏体は肉体は強力だが微に入り細(さい)をうがつ繊細な作業部分は人や猫士に劣る。
人や猫士は成長するまで、蜘蛛型舞踏体に保護してもらうことができる。
成長した人や猫士は蜘蛛型舞踏体を保護(整備)することができる。
そして、それらの活動を全員が共有することができる。
データ上や数値化では求めきれない、感情の共有。個性との共有。
平和的活動を目的とした種族アイドレスである蜘蛛型舞踏体は、建設・児童福祉・内政などの活動を中心とし、また、そのための能力に特化する。
そもそも、戦闘用に生まれていないため、特性を活かすとなると、必然的にそれらの活動が中心になるのだ。
共に和を為す。
目指すその立ち位置を具現化することで、NWの更なる平和に尽力していくことができるだろう。
○蜘蛛型舞踏体の活用事例:その1
報告書にあるとおり、蜘蛛型舞踏体は、高層ビルの建設やメンテナンスに特化する。
それらはかつて人(や、そのパートナーである猫士)が行なったことである。
現在では、蜘蛛型舞踏体が人やサイボーグ(大型含む)、と連携してその作業を円滑化している。
すべては役割分担であり、安全性への特化である。
○蜘蛛型舞踏体の活用事例:その2
保育士を代表とする児童福祉に蜘蛛型舞踏体が特化したのはFEGの願いゆえ。でもある。
人や猫士は幼少より蜘蛛型舞踏体含む多くの種族に触れることにより、この世界は自己単体の種族のみで生きているわけではないことを学べる。
それは蜘蛛型舞踏体も同様であり、生身や機械の差異や特長を知ることで、蜘蛛型舞踏体たちにも個性が生まれ、種族の形質保護の一環を担うことができる。
同然ながら、人・猫士・蜘蛛型舞踏体、それぞれの特性を活かしての児童福祉である。
蜘蛛型舞踏体の活躍により、児童が事故に合う比率も減少傾向にある。という統計も算出されている。
様々な種族が協調する結果として、FEG国民はNW全土に広がる多種多様の種族・知類への理解を深めることができる。
相互理解が生み出すのは協調であり平和である。
蜘蛛型舞踏体がFEGの児童福祉に特化することにより、生まれるメリットは計り知れない。
○蜘蛛型舞踏体の活用事例:その3
内政にも蜘蛛型舞踏体は活躍の場を見いだしている。
そもそも、その複雑な体躯を円滑に活動させるために高い演算能力を有しているため、その能力を活かした吏族作業により、国家の内政を安定化させてくれている。
当然ながら、蜘蛛型舞踏体は機械ではないため、人の吏族などとも連携し、問題点を処理していく。
ただ、その演算能力を作業に集中させてる時間は体躯を動かせない場合がある。稼働熱から猫士のひなたぼっこ替わりの台座になることも多く、政庁城では笑いを誘っている。
これらは問題点では無く、愛きょう。種族が持つ弱点などとして定義されている。
過去に学んだFEGや、NW全体の問題点の改善であり、完璧を目指したゆえに絶滅寸前まで追い込まれた蜘蛛型舞踏体という種族として、残される特長である。
どのような種族も、長所があれば短所もあるのだ。